Robust Real-Time Group Activity Recognition of Robot Teams (RA-L 2021)
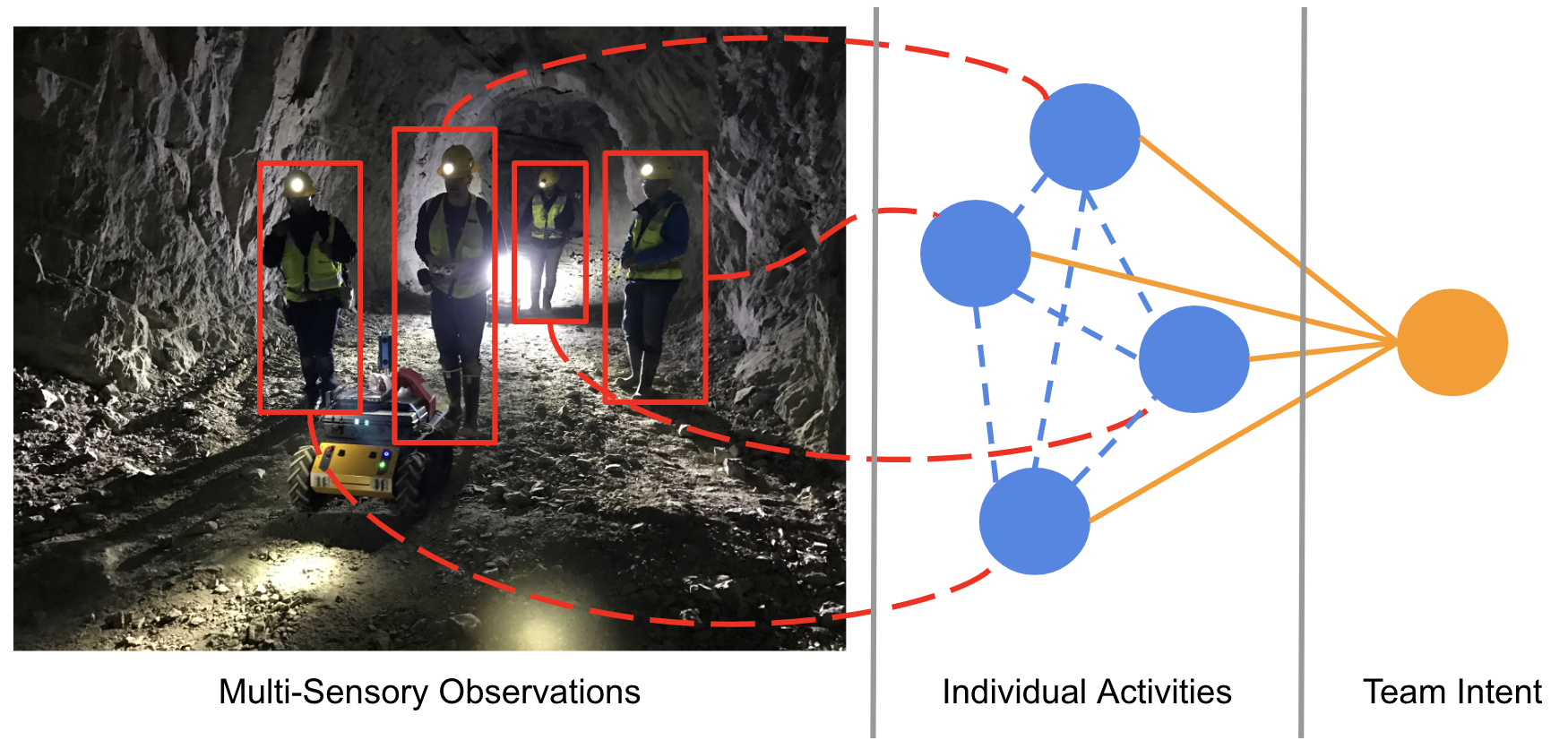
Recognition of group activities is critical for the success of applications that depend on effective human-robot teaming. Awareness of these group activities (also referred to team behaviors in some literature), including the individual activities of human teammates and the overall team intent, allows robotic teammates to work alongside humans without explicit commands and to offer proactive assistance towards the overall mission. In this paper, we present a novel approach to robot recognition of team activities, simultaneously learning a projection from multi-sensory input data to a latent representation of individual activities and a projection from this representation to the overall activities. We introduce a smoothed iterative reweighted algorithm to solve this formulated optimization problem, guaranteed to converge to an optimal solution. We evaluate our approach extensively on benchmark group and team activity datasets, showing that our approach achieves state of the art performance while operating in real-time on mobile robots.
Citation: Robust Real-Time Group Activity Recognition of Robot Teams. Lyujian Lu, Hua Wang, Brian Reily, and Hao Zhang. IEEE Robotics and Automation Letters (RA-L), 2021.