Real-Time Recognition of Team Behaviors by Multisensory Graph-Embedded Robot Learning (IJRR)
[paper]
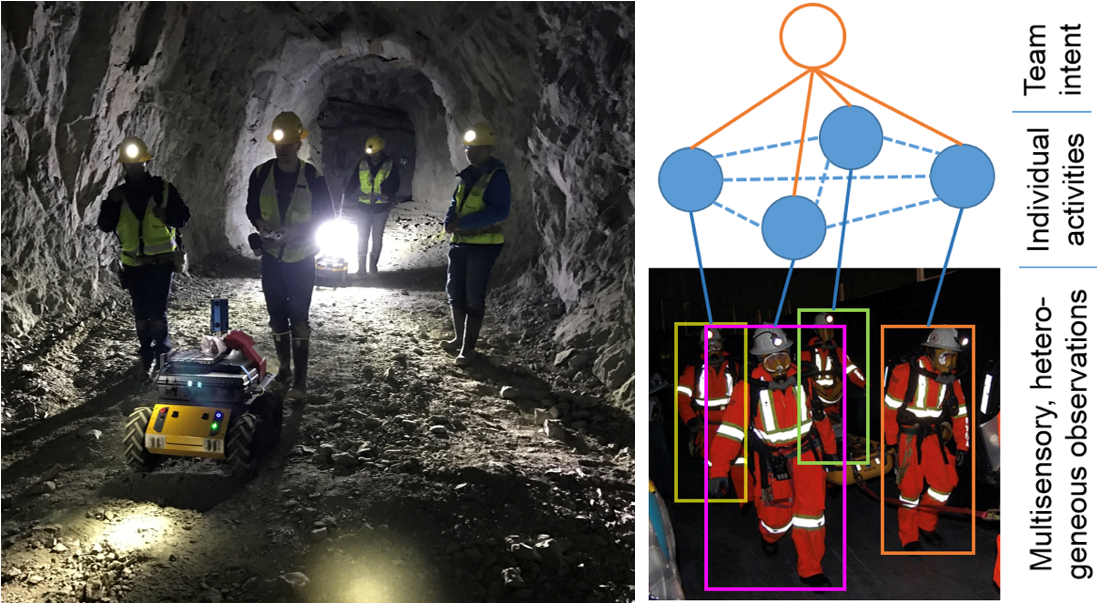
Awareness of team behaviors (e.g., individual activities and team intents) plays a critical role in human-robot teaming. Autonomous robots need to be aware of the overall intent of the team they are collaborating with in order to effectively aid their human peers or augment the team’s capabilities. Team intents encode the goal of the team, which cannot be simply identified from a collection of individual activities. Instead, teammate relationships must also be encoded for team intent recognition. In this paper, we introduce a novel representation learning approach to recognizing team intent awareness in real-time, based upon both individual human activities and the relationship between human peers in the team. Our approach formulates the task of robot learning for team intent recognition as a joint regularized optimization problem, which encodes individual activities as latent variables and represents teammate relationships through graph embedding. In addition, we design a new algorithm to efficiently solve the formulated regularized optimization problem, which possesses a theoretical guarantee to converge to the optimal solution. To evaluate our approach’s performance on team intent recognition, we test our approach on a public benchmark group activity dataset and a multisensory underground search and rescue team behavior dataset newly collected from robots in an underground environment, as well as perform a proof-of-concept case study on a physical robot. The experimental results have demonstrated both the superior accuracy of our proposed approach and its suitability for real-time applications on mobile robots.
Citation: Real-Time Recognition of Team Behaviors by Multisensory Graph-Embedded Robot Learning. Brian Reily, Peng Gao, Fei Han, Hua Wang, and Hao Zhang. International Journal of Robotics Research (IJRR), 2021.