Team Assignment for Heterogeneous Multi-Robot Sensor Coverage through Graph Representation Learning (ICRA 2021)
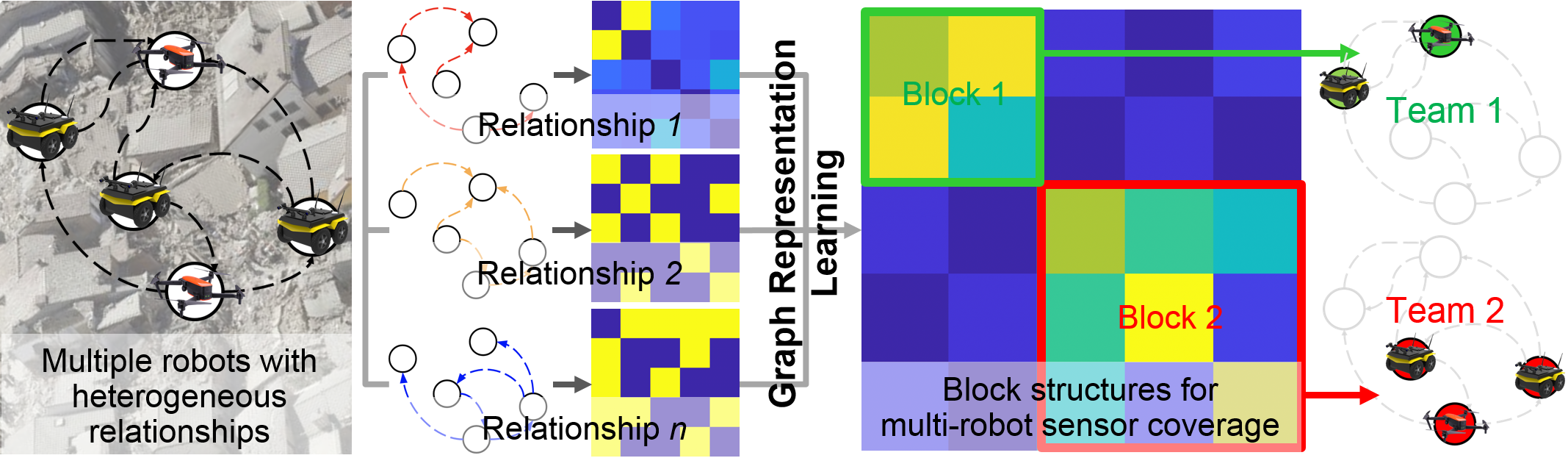
Sensor coverage is the critical multi-robot problem of maximizing the detection of events in an environment through the deployment of multiple robots. Large multi-robot systems are often composed of simple robots that are typically not equipped with a complete set of sensors, so teams with comprehensive sensing abilities are required to properly cover an area. Robots also exhibit multiple forms of relationships (e.g., communication connections or spatial distribution) that need to be considered when assigning robot teams for sensor coverage. To address this problem, in this paper we introduce a novel formulation of sensor coverage by multi-robot systems with heterogeneous relationships as a graph representation learning problem. We propose a principled approach based on the mathematical framework of regularized optimization to learn a unified representation of the multi-robot system from the graphs describing the heterogeneous relationships and to identify the learned representation’s underlying structure in order to assign the robots to teams. To evaluate the proposed approach, we conduct extensive experiments on simulated multi-robot systems and a physical multi-robot system as a case study, demonstrating that our approach is able to effectively assign teams for heterogeneous multi-robot sensor coverage.
Citation: Team Assignment for Heterogeneous Multi-Robot Sensor Coverage through Graph Representation Learning. Brian Reily and Hao Zhang. International Conference on Robotics and Automation (ICRA), 2021.